舵机控制器分为:①电动舵机,由电动机、传动部件和离合器组成。接受自动驾驶仪的指令信号而工作。②液压舵机,由液压作动器和旁通活门组成。此外,还有电动液压舵机,简称“电液舵机”。

舵机,是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。在自动驾驶仪中操纵飞机或者航行体舵面(操纵面)转动的一种执行部件。
舵机控制器分为:①电动舵机,由电动机、传动部件和离合器组成。接受自动驾驶仪的指令信号而工作。②液压舵机,由液压作动器和旁通活门组成。此外,还有电动液压舵机,简称“电液舵机”。
我公司生产的舵机控制器适配与直流电机驱动的舵机控制器。改控制器接受上级控制器的命令,并按照该命令执行相关动作,同时向上级控制器反馈当前状态。
(1)随动位置闭环控制,即舵机控制器按照上级控制器命令要求操舵。
(2)两路舵机控制。该舵机控制器能同时控制两路舵机转动。
(3)采用CAN、RS422两种通讯接口同上级控制器通讯,接口光电隔离设计。
(4)舵机控制器防护等级不低于IP55。
(1)舵机具备同步工作模式和异步工作模式,在同步模式下对两路舵机执行相同的操作动作,在所有工作中要求两路舵机输出相同的实际角度;异步模式下,两路舵机可执行不同的操作动作,每次操舵动作两路可执行不同的目标角度,两路舵机可按照不同的角度轨迹操舵,同步模式和异步模式通过电路板上的拨码开关选择。
(2)舵机控制器在接受到上级控制器的合法命令后,在50ms内反馈当前状态给上级控制器。
(3)舵机控制器具备自动应急操舵功能。
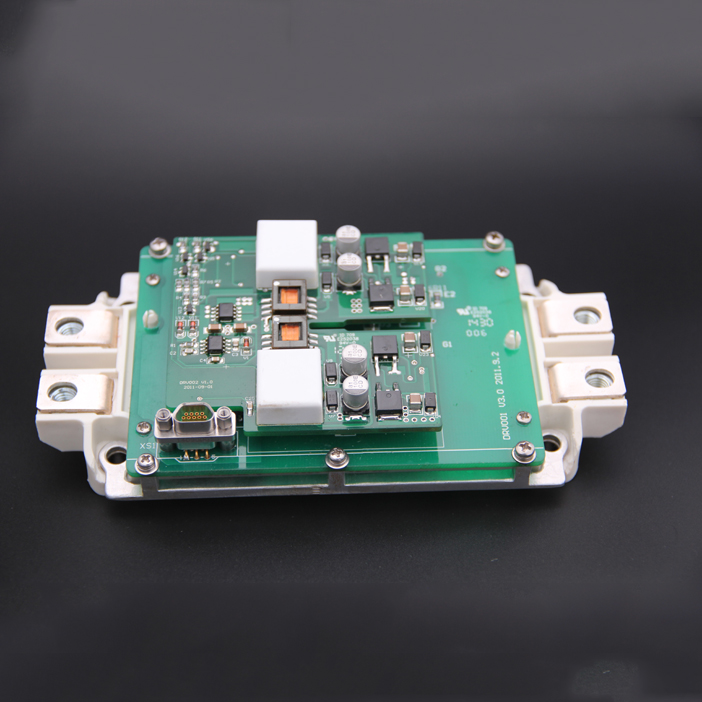
下图为舵机控制器

(1) 驱动电机类型:有刷直流电机;
(2) 额定电压DC24V;
(3) 每路额定输出功率75W;
(4) 额定转舵速度:12°±2°/s;
(5) 适配舵机构位置检测电位计,阻值2KΩ±10%;
(6) 两舵机转舵范围:-30°-+30° ,平均转舵速度10°~20°/s;
(7) 控制精度≤0.5°;
(8) 同步模式下,在舵机的额定功率内,两路舵机同时转动时,在其转动的全过程中,两路舵机的实际舵角位置相差不大于1°;
(9) 空载情况下舵机超调量不大于5%,超调次数不大于2次;空载响应情况下,舵机控制器从接收到转舵指令到转度超过6°的时间不超过1s。
地址:武汉东湖新技术开发区长城科技园长城园一路六号
电话:027-67845012/67845013
邮箱:hddz_admin@163.com
邮编:430223
鄂ICP备05006677号 公安备案号:2018502001418
Copyright◎2014 All Rights Reserved. 版权所有:武汉环达电子科技有限公司